
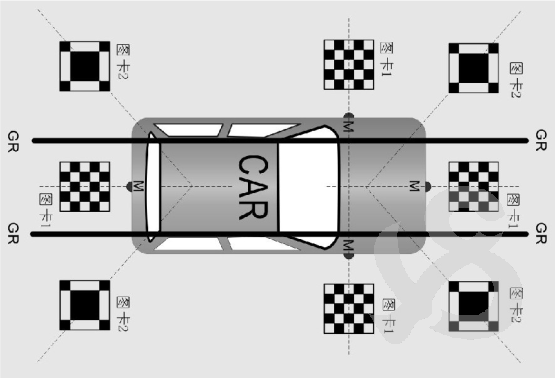
车载环视系统包括:
装配在车体前、后、左、右的四路摄像头(M);
对应设置在四路摄像头(M)下方地面上的四个标定板(图卡1);
分别设置于相邻两个平行于第一标定板(图卡1)之间地面上的四个第二标定板(图卡2);第二标定板(图卡2)位于相邻两路所述摄像头(M)的重合摄像区间内。
摄像头标定机构包括:
图像获取模块---用于在标定过程中获取摄像头(M)拍摄的第一标定板(图卡1)和所述第二标定板(图卡2)的图像;
坐标确定模块---用于根据所述图像,确定第一标定板(1)和第二标定板(2)上各角点在车身坐标系中的坐标;
坐标确定模块包括:
第一坐标确定单元,用于根据摄像头(M)拍摄的第一标定板(图卡1)的图像,确定第一标定板(图卡1)上各角点在车身坐标系中的坐标;
第二坐标确定单元,用于根据摄像头(M)拍摄的第二标定板(图卡2)的图像,确定第二标定板(图卡2)上各角点在车身坐标系中的坐标;
摄像头外参标定模块---用于根据第一标定板(图卡1)和第二标定板(图卡2)上各角点在车身坐标系中的坐标,分别标定所述摄像头(M)相对于车身坐标系的外部参数。
摄像头外参标定模块包括:
第一摄像头外参标定单元,用于根据第一标定板(图卡1)上各角点在车身坐标系中的坐标,标定摄像头(M)相对于车身坐标系的第一外部参数;
第二摄像头外参标定单元,用于根据第二标定板(图卡2)上各角点在车身坐标系中的坐标,标定所述摄像头(M)相对于所述车身坐标系的第二外部参数。
标定装置还包括---导向机构(GR),用于使待标定车辆(CAR)的行驶路径不经过第一标定板(图卡1)和第二标定板(图卡2)。
导向机构(GR)包括:
设置于待标定车辆(CAR)的车轮内侧地面上的两条导轨;
导向机构上的多个位置传感器,设置在地面预设行驶区域;
控制器,设置在所述待标定车辆(CAR)上;
报警器,设置在所述待标定车辆(CAR)上;
位置传感器、所述控制器、所述报警器顺次电性连接。
技术说明:
车载环视系统通过为驾驶员提供车身四周无死角的动态影像,为驾驶员提供在起步、停车等场景下的视觉辅助。
车载环视系统是由装配在车体前、后、左、右的摄像头(例如广角、或鱼眼摄像头)构成,每台摄像头覆盖一定摄像区间,摄像头所摄取的图像经过视点变换生成俯视校正图,并进行拼接得到车载环视俯瞰图。
为了使车载环视俯瞰图实现无缝拼接,且不会发生畸变,上述各摄像头相对于车身坐标系的外部参数必须被精确标定,所以,提供一种车载环视系统标定装置是十分必要的。
现有技术提供了一种基于灵活标定板的车载环视系统标定装置,该车载环视系统包括装配在车体前、后、左、右的四个摄像头,该标定装置包括:对应设置在每个摄像头下方的四个标定板。标定时,对各摄像头配置初始外参(初始外参指的是根据各摄像头的预先设计参数,所确定的设计外参),根据该初始外参生成俯视校正图,在俯视校正图上检测和提取各标定板的角点信息,根据角点信息计算各摄像头的外参,使摄像头的外部参数被精确标定。

 客服1
客服1  客服2
客服2